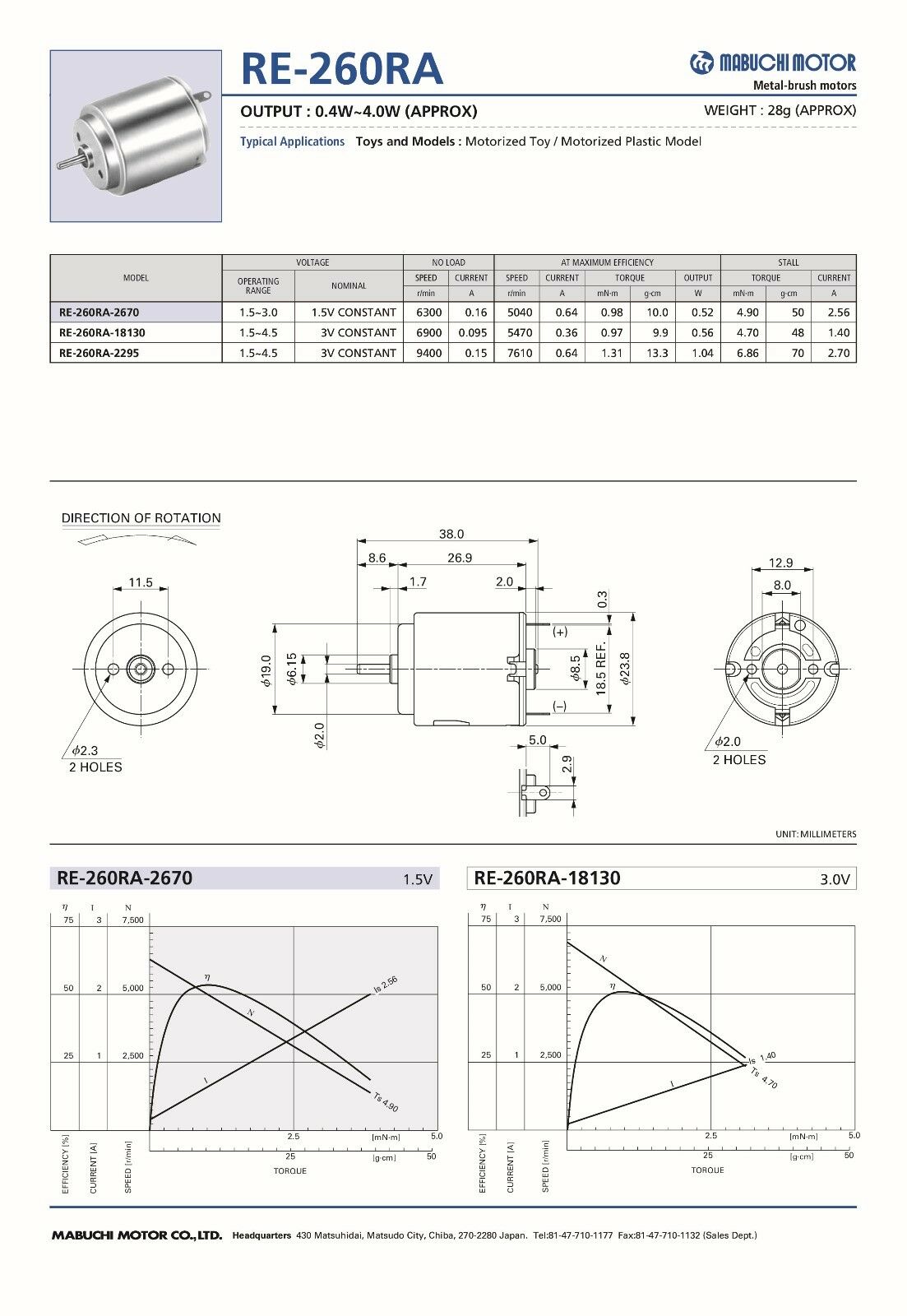
マブチモーターの各種係数を仕様書データをもとに推定する。型番もあるようだが通常はどれを使うか不明のためRE-260RA-2670で行う。
 まず、RE-260より
まず、RE-260より
I=(T+To)/Kt //T:トルク To:損失トルク Kt:トルク係数[N*m/A]
w = (V- Ra*I)/Ke //w:角速度rpm V:印加電圧 R:モーター抵抗(直列)
//Ke:逆起電圧係数[V/rpm]
とモデルを立て、仕様書のデータと一致するように数値を割り当てると
To損失トルク = 2.50*10^-4[N*m]
Ktトルク係数 = 2.00*10^-3[N*m/A]
Ke逆起電圧係数 = 2.53*10^-4[V/rpm] = 2.42*10^-3[V/(rad/s)]
Raモーター抵抗 = 0.633[Ω]
となった。実際にモーター間抵抗を計測すると3Ω程であった、静止状態の抵抗測定は接触の仕方、コイルの通貨状態でちょっと変わるのかもしれない。
次にRS-380PH
https://www.marutsu.co.jp/contents/shop/marutsu/datasheet/rs380ph.pdf
To損失トルク = 4.2*10^-3[N*m] //10倍以上:ちょっと誤差が大きく表れるのかもしれない 使用電圧、電流が260の5倍程度あるため比較できないかも
Ktトルク係数 = 4.62*10^-3[N*m/A] //約二倍出ている
Ke逆起電圧係数 = 5.23*10^-4[V/rpm] = 4.99*10^-3[V/(rad/s)]
Raモーター抵抗 = 0.53[Ω]
モーター抵抗・逆起電圧係数ともにほぼ違いがない。コイルの巻き数は増えているはずだと思うのだが・・・
I=(T+To)/Kt //T:トルク To:損失トルク Kt:トルク係数[N*m/A]
w = (V- Ra*I)/Ke //w:角速度rpm V:印加電圧 R:モーター抵抗(直列)
//Ke:逆起電圧係数[V/rpm]
とモデルを立て、仕様書のデータと一致するように数値を割り当てると
To損失トルク = 2.50*10^-4[N*m]
Ktトルク係数 = 2.00*10^-3[N*m/A]
Ke逆起電圧係数 = 2.53*10^-4[V/rpm] = 2.42*10^-3[V/(rad/s)]
Raモーター抵抗 = 0.633[Ω]
となった。実際にモーター間抵抗を計測すると3Ω程であった、静止状態の抵抗測定は接触の仕方、コイルの通貨状態でちょっと変わるのかもしれない。
次にRS-380PH
https://www.marutsu.co.jp/contents/shop/marutsu/datasheet/rs380ph.pdf
To損失トルク = 4.2*10^-3[N*m] //10倍以上:ちょっと誤差が大きく表れるのかもしれない 使用電圧、電流が260の5倍程度あるため比較できないかも
Ktトルク係数 = 4.62*10^-3[N*m/A] //約二倍出ている
Ke逆起電圧係数 = 5.23*10^-4[V/rpm] = 4.99*10^-3[V/(rad/s)]
Raモーター抵抗 = 0.53[Ω]
モーター抵抗・逆起電圧係数ともにほぼ違いがない。コイルの巻き数は増えているはずだと思うのだが・・・
コメント
コメントを投稿